XCMG Liugong lastikli yükleyici için lastikli yükleyici bağlantı kolu yedek parçaları

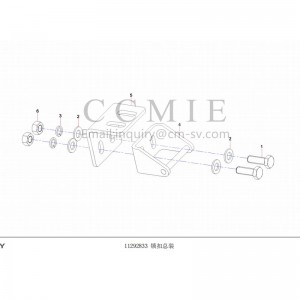
Biyel kolu
Birçok yedek parça çeşidi olduğundan hepsini web sitemizde gösteremiyoruz. Lütfen spesifik olanlar için bizimle iletişime geçmekten çekinmeyin.
Avantaj
1. Sizin için hem orijinal hem de satış sonrası ürünler tedarik ediyoruz
2. Üreticiden doğrudan müşteriye, maliyetinizden tasarruf edin
3. Normal parçalar için stabil stok
4. Zamanında Teslim Süresi, rekabetçi nakliye maliyeti ile
5. Profesyonel ve zamanında servis sonrası
Ambalaj
Karton Kutular veya müşterilerin isteğine göre.
Tanım
Biyel kolunun işlevi, pistonu ve krank milini birbirine bağlamaktır, böylece pistonun ileri geri doğrusal hareketi, krankın çıkış gücüne dönüş hareketi haline gelir.
Biyel kolu gövdesi üç parçadan oluşur; piston pimine bağlanan parçaya biyel kolu küçük ucu denir; Krank miline bağlanan kısma biyel büyük ucu, küçük uç ile büyük ucu bağlayan çubuğa ise biyel mili adı verilir. Biyel kolunun küçük başı çoğunlukla ince duvarlı dairesel bir halka yapısıdır. Piston pimi ile piston pimi arasındaki aşınmayı azaltmak için küçük kafa deliğine ince duvarlı bronz bir burç bastırılır. Sıçrayan yağın, yağlama burcunun ve piston piminin temas yüzeyine girmesini sağlamak için küçük başlık ve burç üzerinde oluklar açın veya frezeleyin. Biyel kolu mili uzun bir çubuktur ve iş sırasında kuvvet de büyüktür. Bükülmesini ve deformasyonunu önlemek için şaftın yeterli sağlamlığa sahip olması gerekir.
Bileşenler arasındaki göreceli hareketin düzlemsel bir hareket mi yoksa uzaysal bir hareket mi olduğuna bağlı olarak bağlantı mekanizması, düzlemsel bağlantı mekanizması ve uzaysal bağlantı mekanizması olarak ikiye ayrılabilir. Düzlem bağlantı mekanizması yaygın bir aktarım mekanizmasıdır. Bu, rijit bileşenlerin tamamının düşük çiftlerle bağlı olduğu anlamına gelir, dolayısıyla buna düşük çift mekanizması da denir. Düzlem bağlantı mekanizması çeşitli makinelerde, aletlerde ve kontrol cihazlarında yaygın olarak kullanılmaktadır. Pistonlu motorlar, pompalar ve hava kompresörlerinin yanı sıra planya makineleri, kanal açma makineleri, ekskavatörler, yükleyiciler, çeneli kırıcılar, döner konveyörler, baskı makineleri, tekstil makineleri vb. ana mekanizmalar düz bağlantı mekanizmalarıdır. Bağlantı mekanizmasında bileşenler aynı düzlemde veya birbirine paralel hareket etmiyorsa mekanizmaya uzaysal mekanizma adı verilir. [3] Mekanizmadaki bileşen sayısına göre dört çubuklu mekanizma, beş çubuklu mekanizma, altı çubuklu mekanizma vb. olarak ayrılır. Genel olarak beş çubuklu ve beşten fazla çubuklu bağlantı mekanizmalarına çoklu denir. -çubuk mekanizmaları. Link mekanizmasının serbestlik derecesi 1 olduğunda buna tek serbestlik dereceli link mekanizması denir; Serbestlik derecesi 1'den büyük olduğunda buna çoklu serbestlik dereceli bağlantı mekanizması denir.
Bağlantı mekanizmasını oluşturan kinematik zincirin açık zincir mi yoksa kapalı zincir mi olduğuna bağlı olarak, ilgili bağlantı mekanizması aynı zamanda açık zincir bağlantı mekanizmasına da bölünebilir (manipülatör genellikle kinematik çiftin dönen bir çift olduğu uzaysal bir açık zincir bağlantı mekanizmasıdır) hareketli bir çift) ve kapalı zincirli bağlantı mekanizması. Tek bir kapalı döngü düzlemsel bağlantı mekanizmasının bileşen sayısı en az 4'tür, dolayısıyla en basit düzlemsel kapalı zincir bağlantı mekanizması dört çubuklu bir mekanizmadır ve diğer çok bağlantılı kapalı zincir mekanizmaları, dört çubuklu bir mekanizmanın genişlemesinden başka bir şey değildir. çubuk grubu bazında; tek kapalı döngü Uzaysal bağlantı mekanizmasının bileşen sayısı en az 3'tür, dolayısıyla üç bileşen, uzaysal üç çubuklu bir mekanizma oluşturabilir.
Bağlantı mekanizması bileşenleri, bilinen hareket yasalarını ve bilinen yörüngeleri gerçekleştirmek için kullanılabilen, dönme, salınım, hareket ve düzlem veya uzaydaki karmaşık hareket gibi çeşitli hareket biçimlerine sahiptir.
Avantajları
(1) Düşük çift: yüzey teması, büyük yük taşıma, yağlanması kolay, aşınması kolay değil, basit şekil, kolay işlenme, yüksek üretim doğruluğu elde edilmesi kolay.
(2) Çubuğun bağıl uzunluğu değiştirildiğinde takipçinin hareket kanunu farklıdır.
(3) İki bileşen arasındaki temas, bazen teması korumak için yaylar ve diğer kuvvet kapatmayı kullanması gereken kam mekanizmalarından farklı olarak, kendi geometrik kapanmasıyla sağlanır.
(4) Biyel kolu eğrisi, farklı gereksinimleri karşılayabilecek zengindir.
Dezavantajları
(1) Çok sayıda bileşen ve hareket çifti vardır, büyük kümülatif hata, düşük hareket doğruluğu ve düşük verimlilik vardır.
(2) Dinamik yük (atalet kuvveti) oluşur ve dengelenmesi kolay değildir ve yüksek hız için uygun değildir.
(3) Tasarım karmaşıktır ve kesin yörüngelere ulaşmak zordur.
Bu nedenle düzlem bağlantı mekanizması çeşitli makine, alet ve elektromekanik ürünlerde yaygın olarak kullanılmaktadır. Bağlantı mekanizması tasarım yöntemlerinin geliştirilmesi, elektronik bilgisayarların popüler uygulaması ve ilgili tasarım yazılımının geliştirilmesiyle, bağlantı mekanizmalarının tasarım hızı ve tasarım doğruluğu büyük ölçüde iyileştirildi ve kinematik gereksinimleri karşılarken aynı zamanda dikkate alınabilir. dinamikler. Özellikle mikroelektronik teknolojisinin ve otomatik kontrol teknolojisinin tanıtılması ve çok serbestlik dereceli bağlantı mekanizmasının benimsenmesi, bağlantı mekanizmasının yapısını ve tasarımını büyük ölçüde basitleştirir ve daha geniş bir uygulama yelpazesine sahiptir.
Depomuz1

Paketleyin ve gönderin

- Havadan Bomlu Asansör
- Çin Damperli Kamyon
- Soğuk Geri Dönüşümcü
- Konik Kırıcı Astarı
- Konteyner Yan Kaldırıcı
- Dadi Buldozer Parçası
- Forklift Süpürme Aparatı
- Hbxg Buldozer Parçaları
- Howo Motor Parçaları
- Hyundai Ekskavatör Hidrolik Pompa
- Komatsu Buldozer Parçaları
- Komatsu Ekskavatör Dişli Mili
- Komatsu Pc300-7 Ekskavatör Hidrolik Pompa
- Liugong Buldozer Parçaları
- Sany Beton Pompası Yedek Parçaları
- Sany Ekskavatör Yedek Parçaları
- Shacman Motor Parçaları
- Shantui Buldozer Debriyaj Mili
- Shantui Buldozer Bağlantı Mili Pimi
- Shantui Buldozer Kontrolü Esnek Şaft
- Shantui Buldozer Esnek Şaft
- Shantui Buldozer Kaldırma Silindiri Tamir Takımı
- Shantui Buldozer Parçaları
- Shantui Buldozer Makara Mili
- Shantui Buldozer Geri Vites Mili
- Shantui Buldozer Yedek Parçaları
- Shantui Buldozer Vinç Tahrik Mili
- Shantui Dozer Cıvatası
- Shantui Dozer Ön Avara
- Shantui Dozer Yatırma Silindiri Tamir Takımı
- Shantui Sd16 Konik Dişli
- Shantui Sd16 Fren Balatası
- Shantui Sd16 Kapı Aksamı
- Shantui Sd16 O-Ring
- Shantui Sd16 Palet Makarası
- Shantui Sd22 Rulman Kolu
- Shantui Sd22 Sürtünme Diski
- Shantui Sd32 Palet Makarası
- Sinotruk Motor Parçaları
- Çekici
- Xcmg Buldozer Parçaları
- Xcmg Buldozer Yedek Parçaları
- Xcmg Hidrolik Kilit
- Xcmg İletimi
- Yuchai Motor Parçaları